Japan
愛知工科大学
STELA OB
慶應義塾大学
髙橋研究室
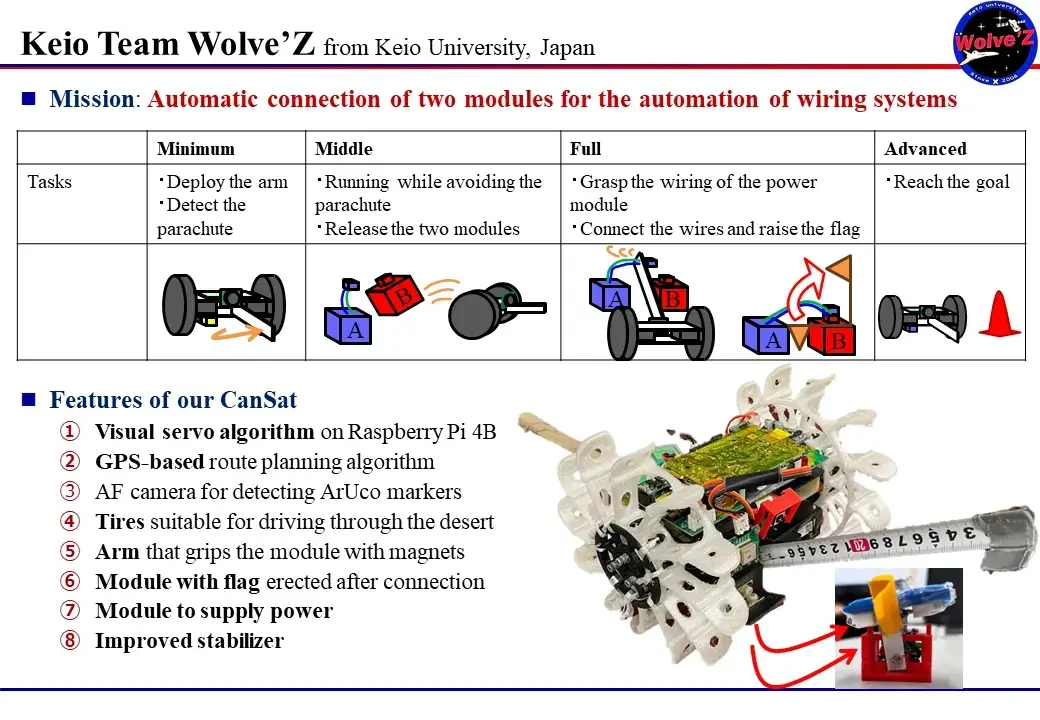
Keio Team Wolve'Z
「配線設備交換のためのビジュアルサーボに基づく単腕自律ローバ」
Best Mission Award 3rd
UNISEC Award 2nd


東京情報大学
斎藤研究室
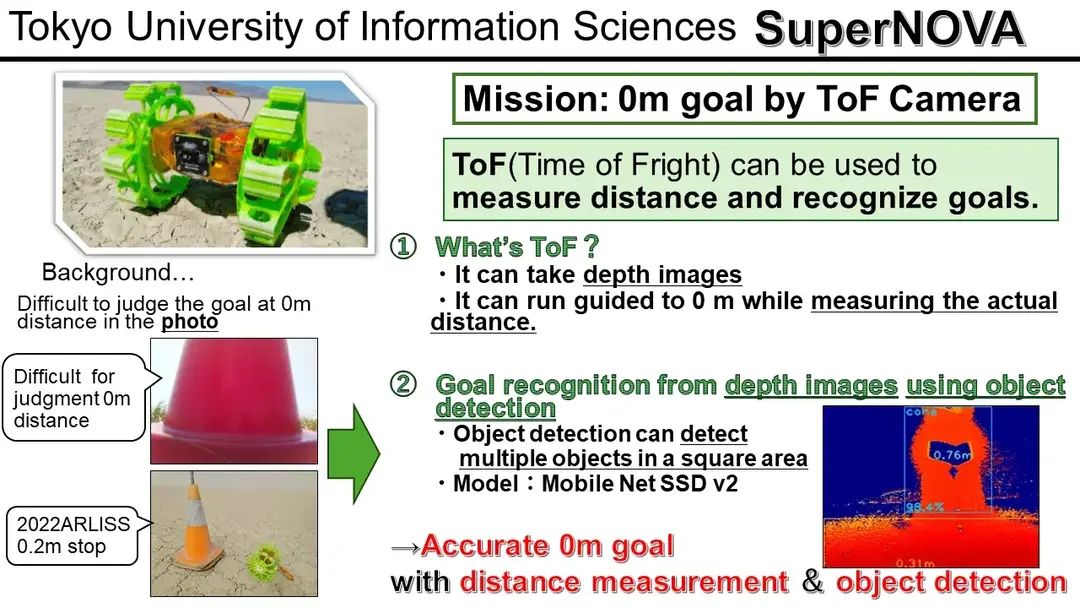
SuperNOVA
「ToFカメラでの距離測定とDeep Learning物体検出で0mゴールを達成する」
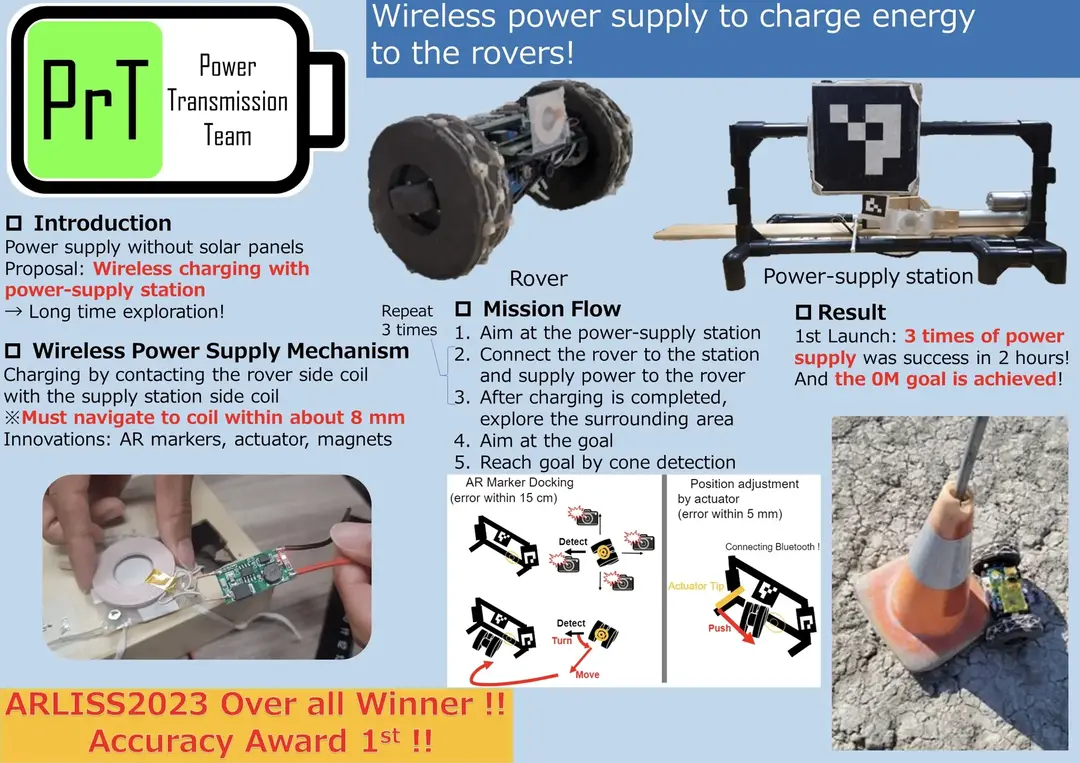
Accuracy Award 1st
Technical System Award 1st
東京情報大学
斎藤研究室
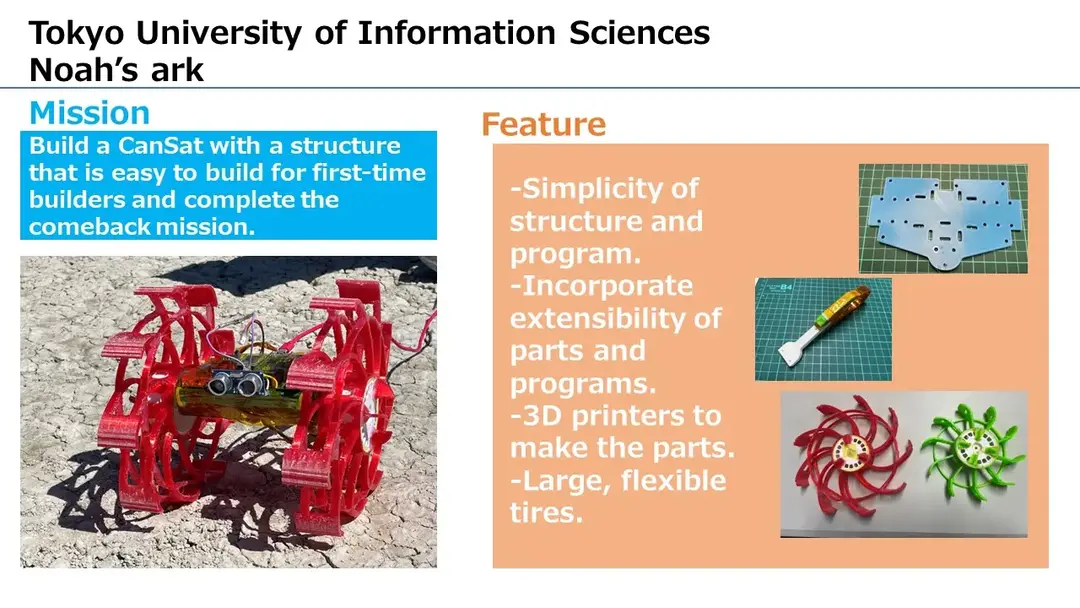
Noah's ark
「入門用CanSatとして初心者でも始めやすいような土台となる基本的な機能を持ったCanSatを作り大会でカムバックミッションを達成する.」
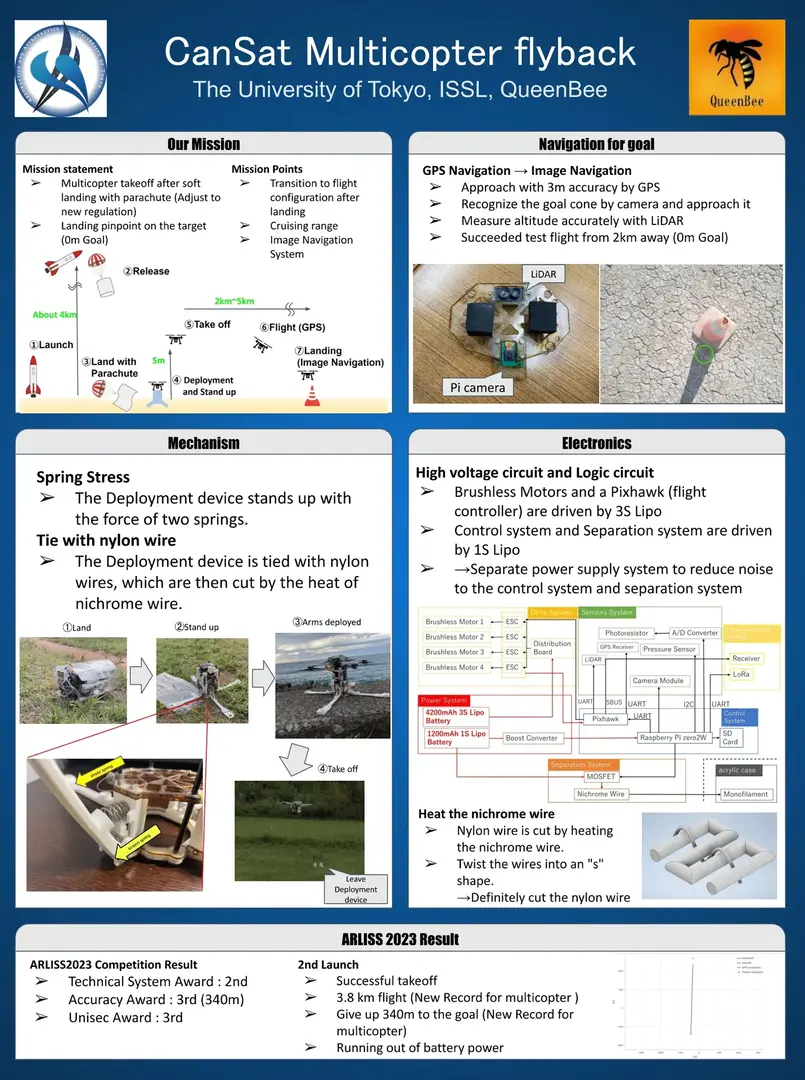
東京大学
中須賀船瀬研究室
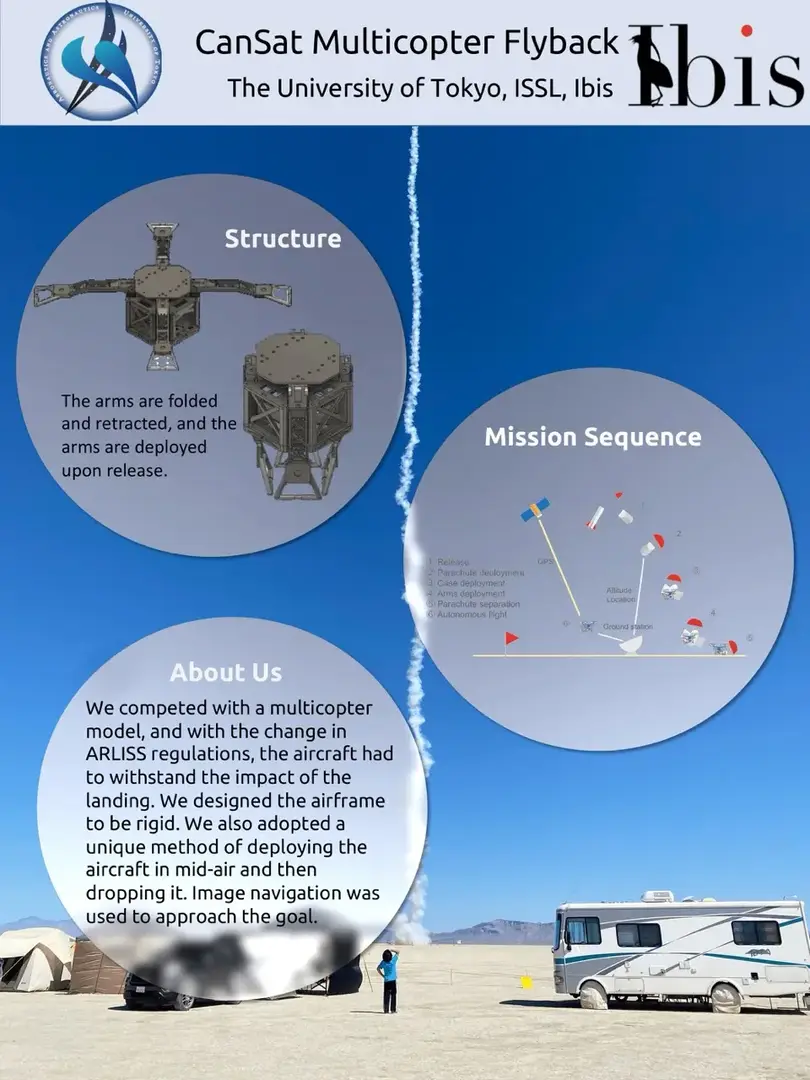
QueenBee
「マルチコプターによるソフトランディングからの離陸と目標へのピンポイント着陸」
Accuracy Award 3rd
Technical System Award 2nd
UNISEC Award 3rd