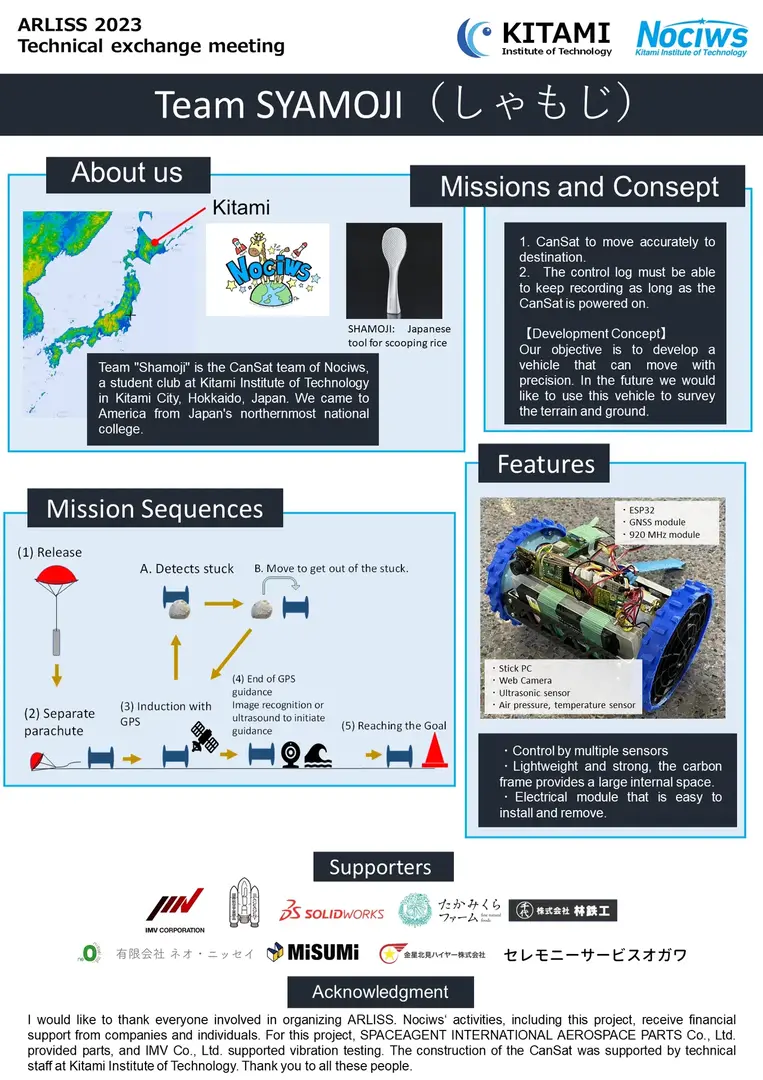
KITAMI Institute of Technology
Nociws
SYAMOJI
「目的地へ正確に移動する探査車を開発し,性能の実証を行なう.」
Click here for the report.
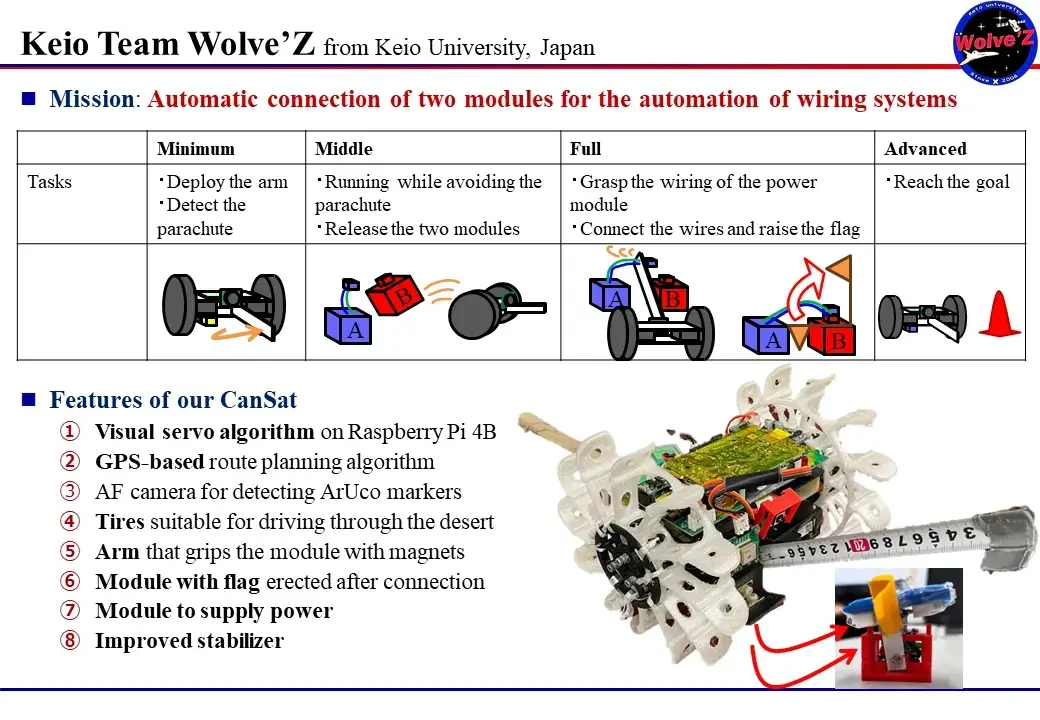
Keio University
Takahashi Research Group
Keio Team Wolve'Z
「配線設備交換のためのビジュアルサーボに基づく単腕自律ローバ」
Best Mission Award 3rd
UNISEC Award 2nd
Click here for the report.
Unversity of Tsukuba
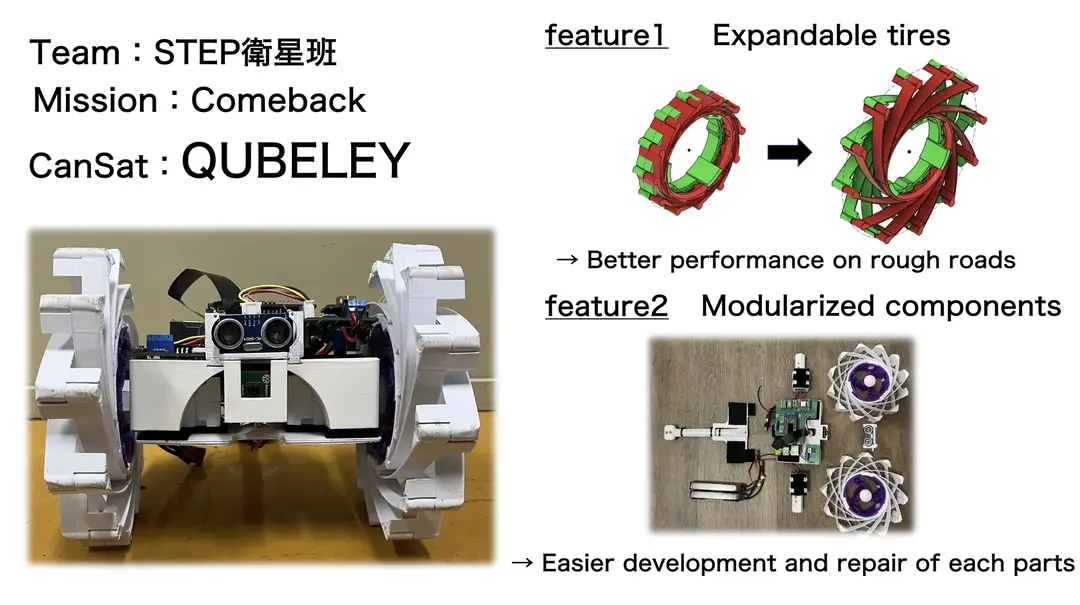
STEP衛星班
「保守性(Maintainability)を考慮した設計により,効率的な開発を実現し,0 mゴールを達成する.」
Click here for the report.
The University of Electro-Communications
Takadama Lab.
Gemini
「”移動”と”探索”のための分離可能な4WDローバの開発」
Best Mission Award 2nd
UNISEC Award 1st
Click here for the report.

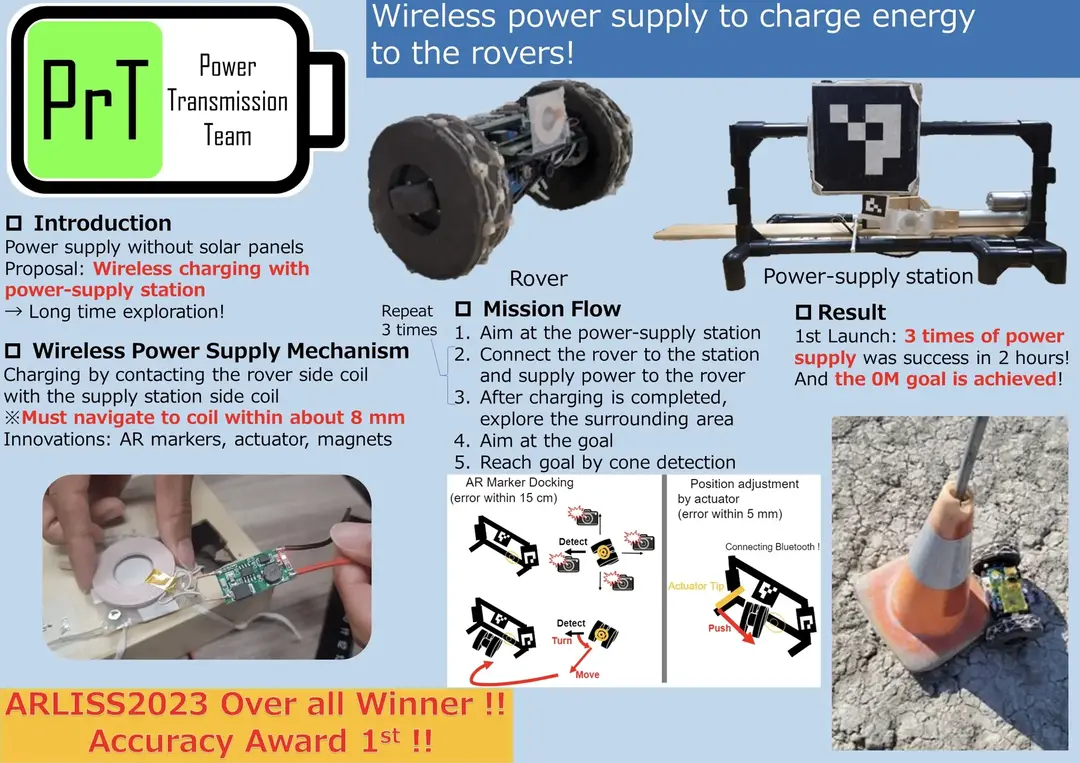
The University of Electro-Communications
Takadama Lab.
PrT
「自律給電ローバーの開発」
Over all Winner
Accuracy Award 1st
Click here for the report.
Tokyo Institute of Technology
CanSat Project
Tlaloc
「月面クレータでの水資源運搬に用いるパイプライン自動敷設システムの実証」
Best Mission Award 1st
Click here for the report.

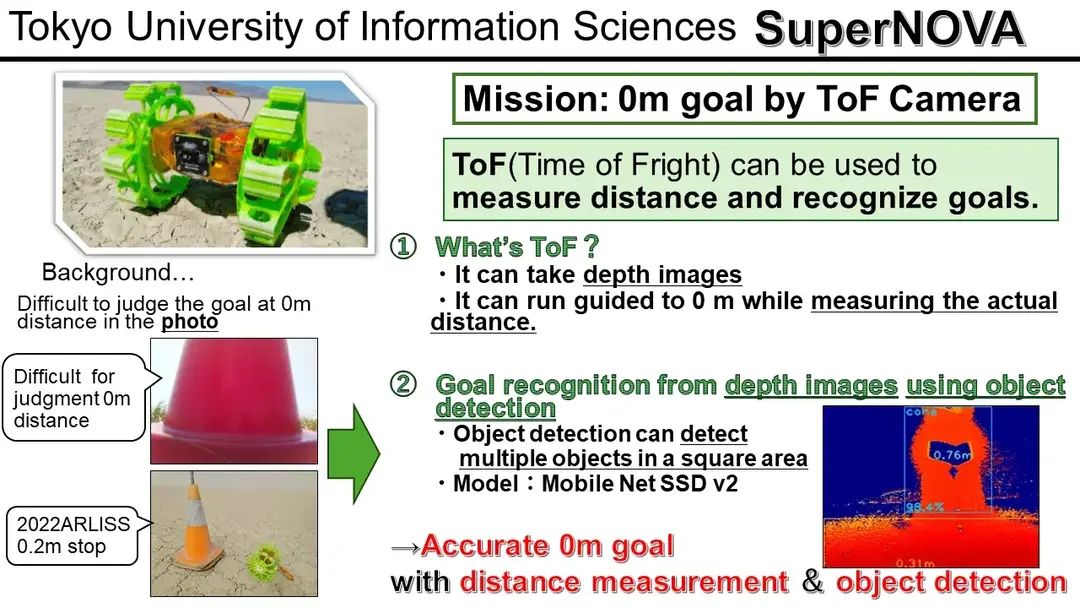
Tokyo University of Information Sciences
Saito Lab.
SuperNOVA
「ToFカメラでの距離測定とDeep Learning物体検出で0mゴールを達成する」
Accuracy Award 1st
Technical System Award 1st
Click here for the report.
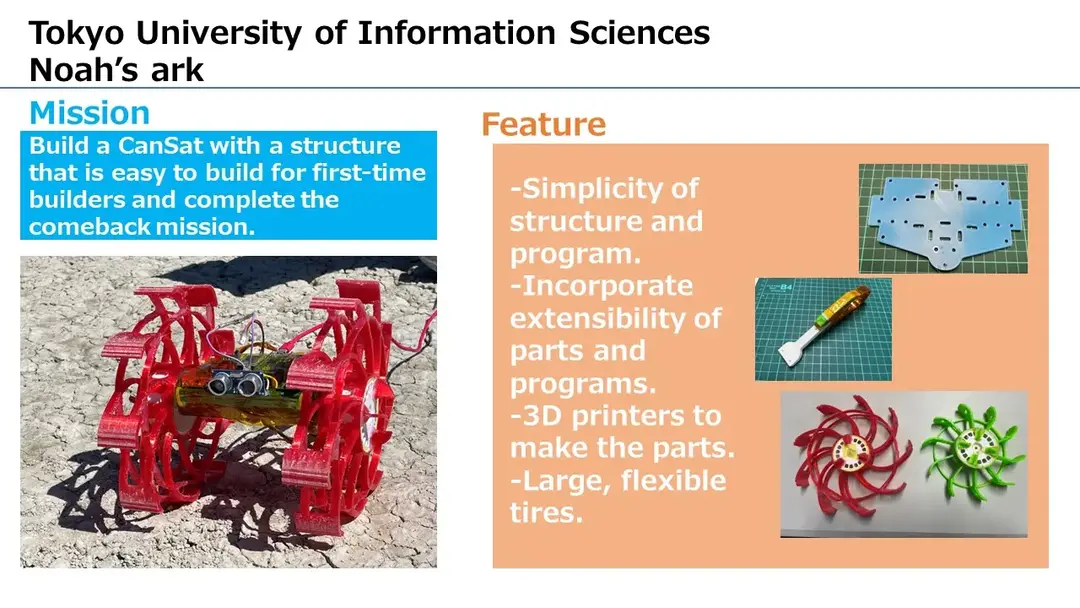
Tokyo University of Information Sciences
Saito Lab.
Noah's ark
「入門用CanSatとして初心者でも始めやすいような土台となる基本的な機能を持ったCanSatを作り大会でカムバックミッションを達成する.」
Click here for the report.
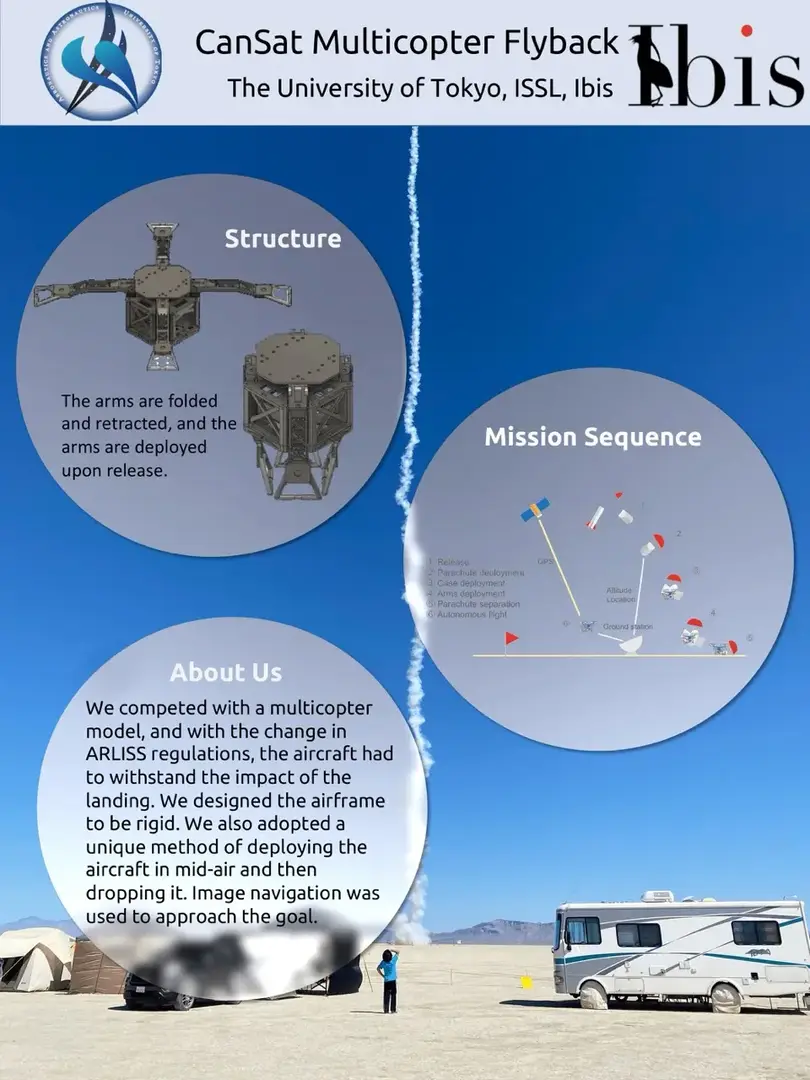
The University of Tokyo,
Intelligent Space Systems Laboratory
Ibis
「マルチコプターを用いた0mゴールの達成」
Click here for the report.
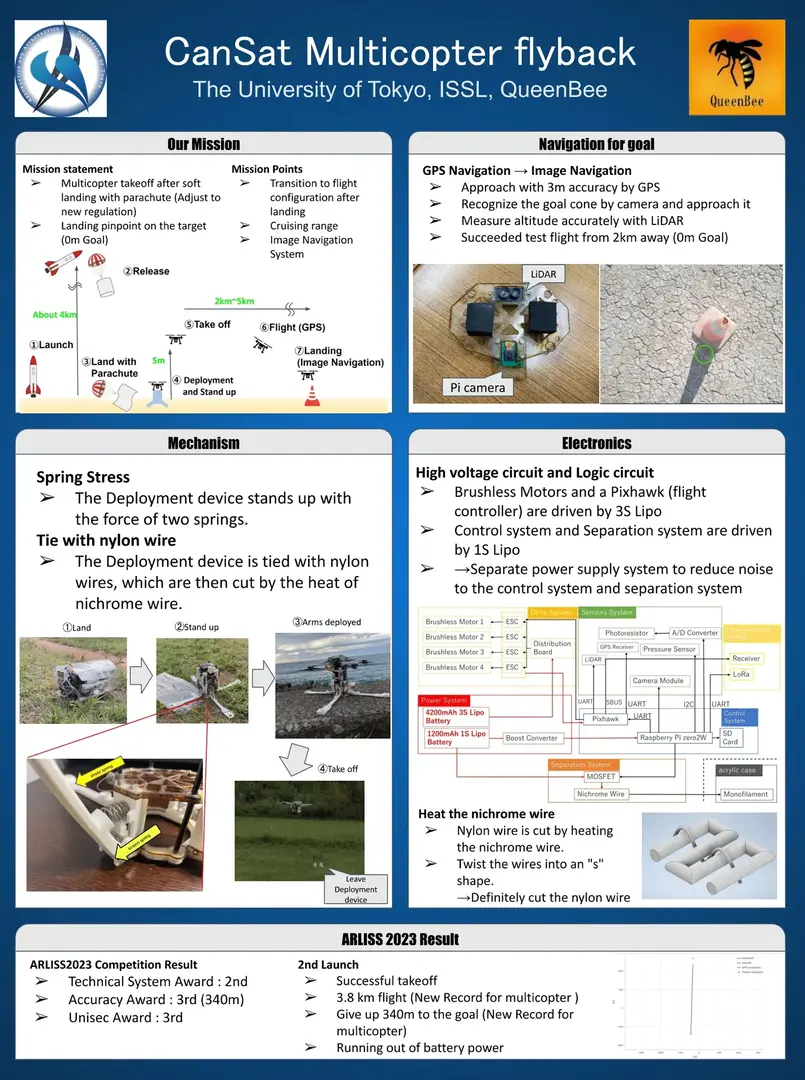
The University of Tokyo,
Intelligent Space Systems Laboratory
QueenBee
「マルチコプターによるソフトランディングからの離陸と目標へのピンポイント着陸」
Accuracy Award 3rd
Technical System Award 2nd
UNISEC Award 3rd
Click here for the report.
Tokyo Denki University
TDU Space Project
「高い走破性能を持ち短時間でのゴール可能な高速機体の開発」
Click here for the report.

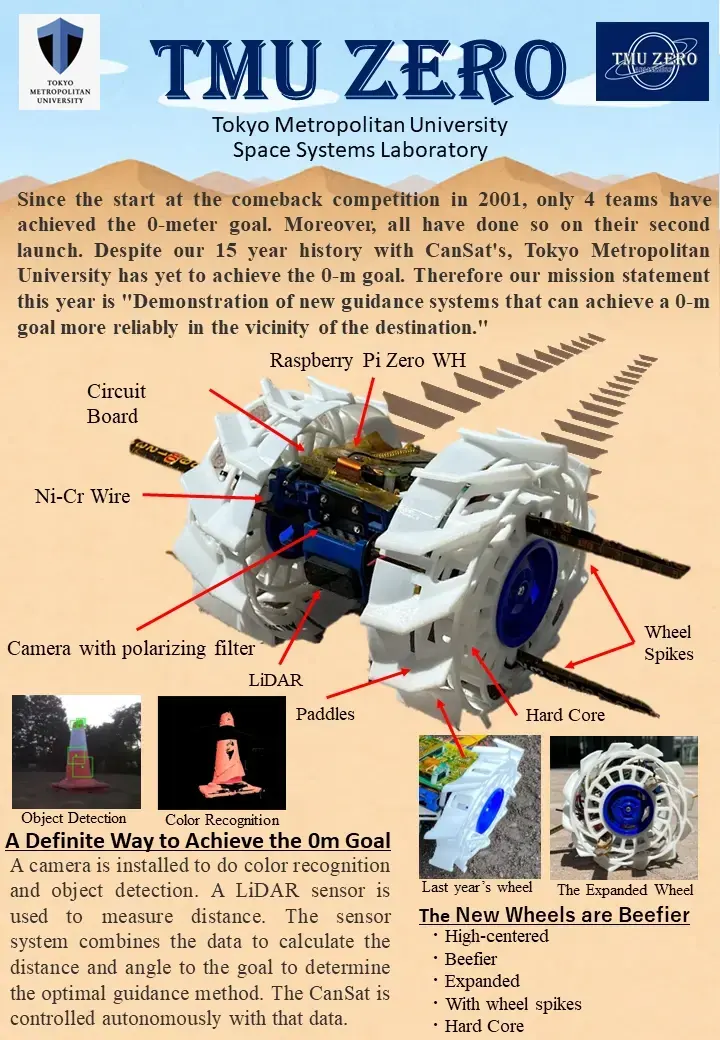
Tokyo Metropolitan University,
Space Systems Laboratory
TMU ZERO
「複数のセンサを用いたセンサシステムと高走破性により確実に0mゴールできる新たな誘導システムの実証」
Click here for the report.
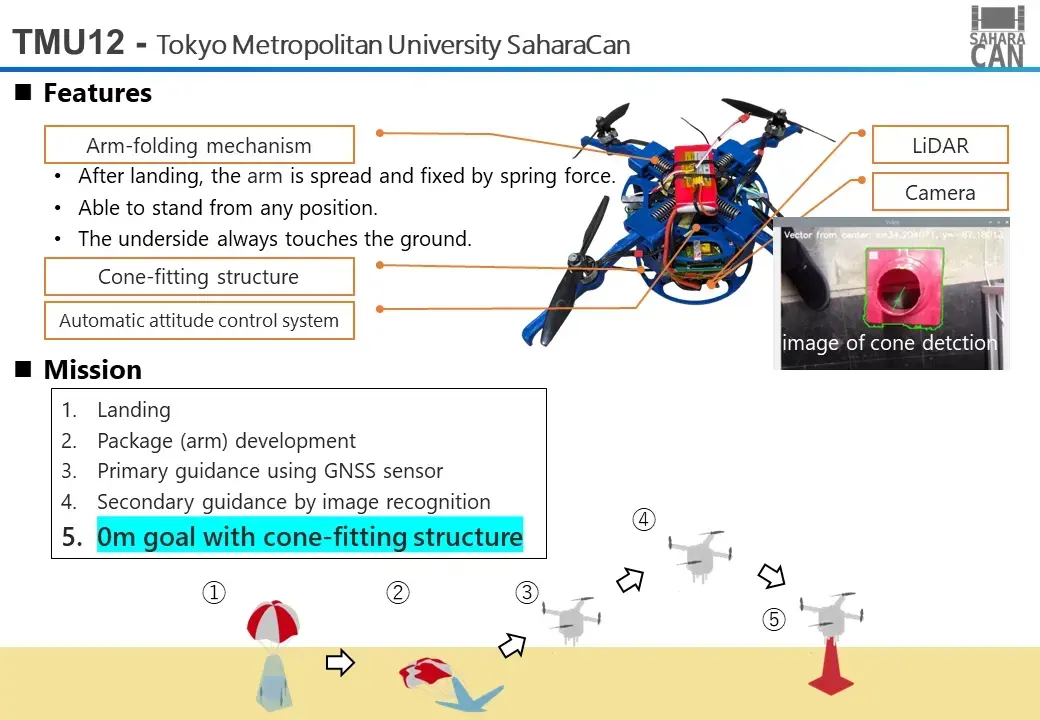
Tokyo Metropolitan University
さはらかん
TMU12
「自動姿勢制御システムとコーンはめこみ構造を備えたクアッドコプターによる0mゴールの達成」
Technical System Award 3rd
Click here for the report.
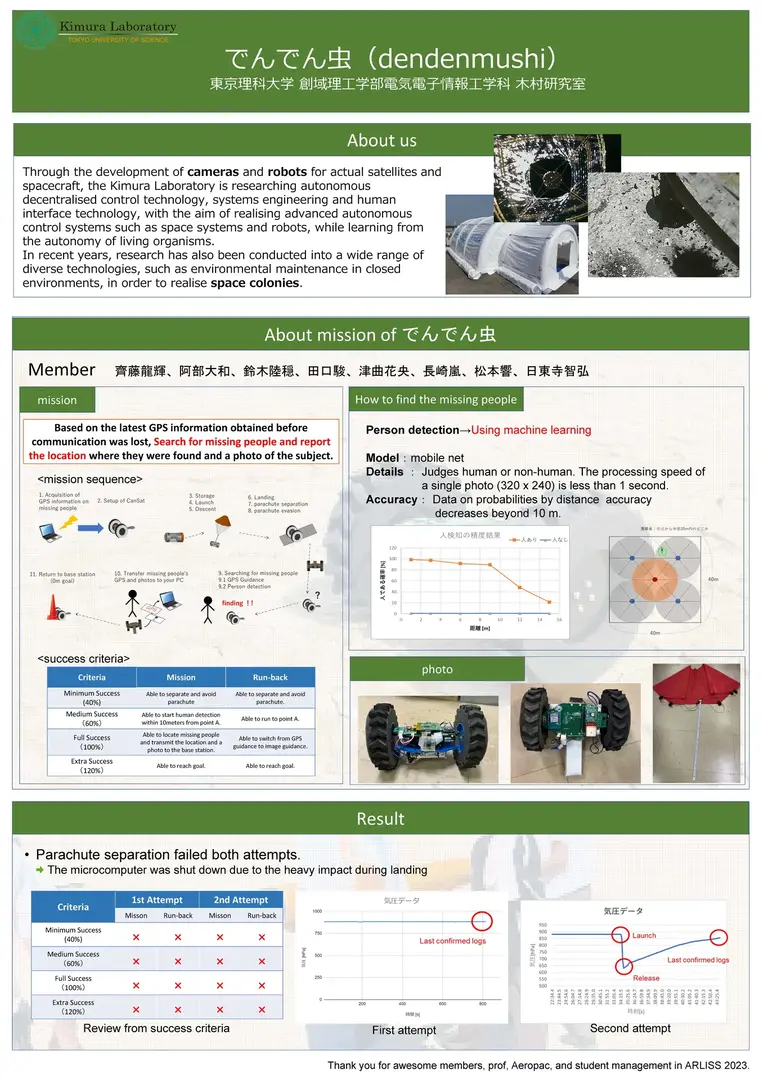
Tokyo University of Science
Kimura Lab.
でんでん虫
「通信が途絶える前に得られた最新のGPS情報をもとにした人の捜索と、その発見地点と対象者の写真を報告する」
Click here for the report.
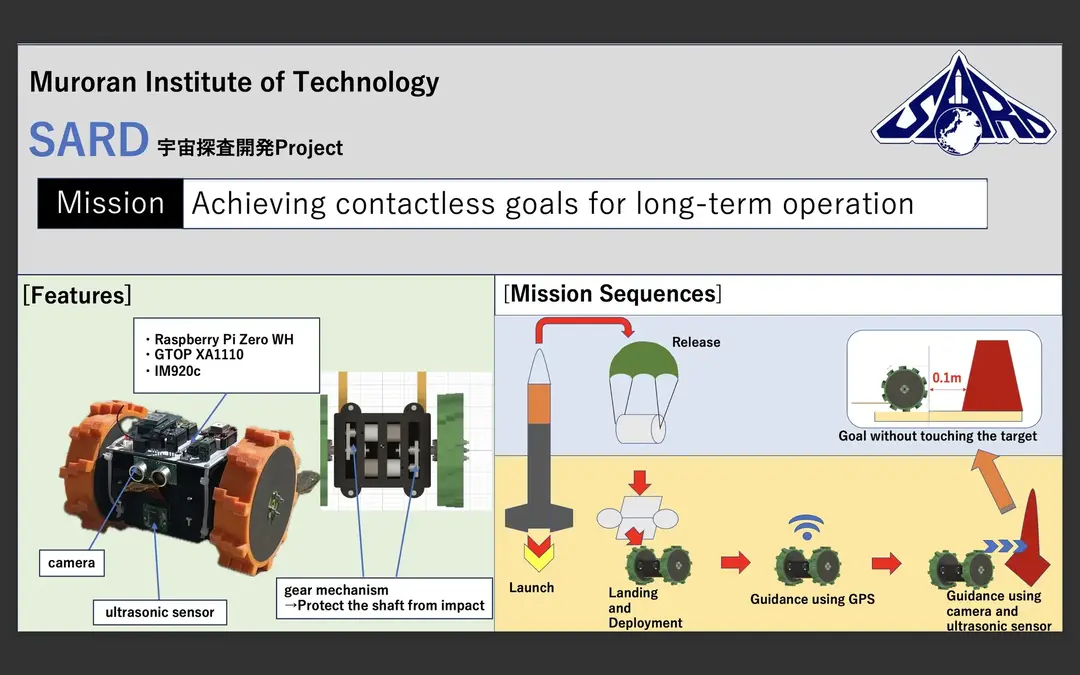
MURORAN Institute of Technology
SARD
宇宙探査開発Project
「長期運用化のための非接触型ゴールの達成」
Click here for the report.